Srinidhi Kalgundi Srinivas

Trying to help robots perceive and interact with our world.
LinkedIn | CV | Google Scholar | GitHub | Contact
Brief Bio
I’m a Robotics Perception Research Scientist in the Robotics Lab at Autodesk Research, where I am working on perception for manipulation. I build datasets, train models for object localization and grasping, work on general scene understanding.
Before this, I interned at Siemens Technology on robotic bin-picking, worked as a Graduate Student Researcher in UC San Diego’s Autonomous Vehicle Laboratory (AVL) under Prof. Henrik I. Christensen focusing on perception for autonomous vehicles, and was a Senior Software Engineer at Analog Devices developing embedded software for automotive infotainment systems.
I hold a masters degree in Electrical and Computer Engineering from the University of California San Diego, where I specialized in Intelligent Systems, Robotics, and Control.
If you are interested in research internships at Autodesk, reach out to me.
Experience
-
Apr 2023 – Present
Autodesk Research
San Francisco, CAPrincipal Reserarch Scientist, Robotics PerceptionLeading perception research for robotic automation, with emphasis on assembly, bin picking, and manufacturing applications.
-
Jun 2022 – Sep 2022
Siemens Technology
Berkeley, CAAdvanced Robotics InternBuilt an end-to-end perception and grasping pipeline for bin-picking applications in logistics automation.
-
Nov 2021 – Mar 2023
Autonomous Vehicle Lab, UC San Diego
San Diego, CAGraduate Student ResearcherDeveloped Deep Neural Networks for modelling the scene around an autonomous car using camera and lidar data.
-
Aug 2018 – Aug 2021
Analog Devices Inc.
Bangalore, IndiaSenior Software EngineerDesigned and developed MISRA-C compliant software stack for Automotive Audio Bus (A²B) on ADI DSPs and led PoCs for customers.
Publications

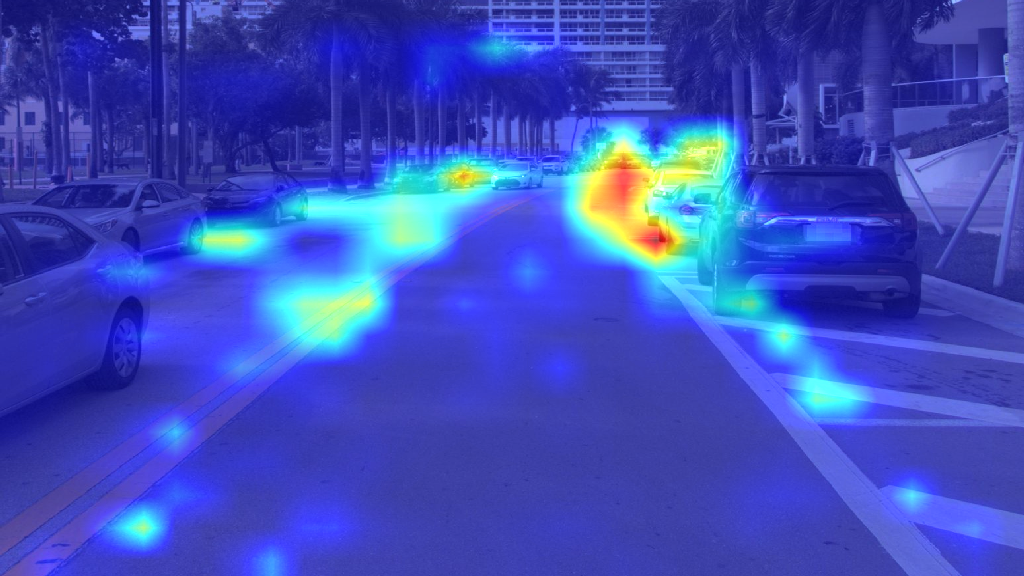
Occlusion-Aware 2D and 3D Centerline Detection for Urban Driving via Automatic Label Generation
David Paz, Narayanan E Ranganatha, Srinidhi Kalgundi Srinivas, Yunchao Yao, Henrik I Christensen
arXiv, 2023

CLiNet: Joint Detection of Road Network Centerlines in 2D and 3D
David Paz, Srinidhi Kalgundi Srinivas, Yunchao Yao, Henrik I Christensen
arXiv, 2023
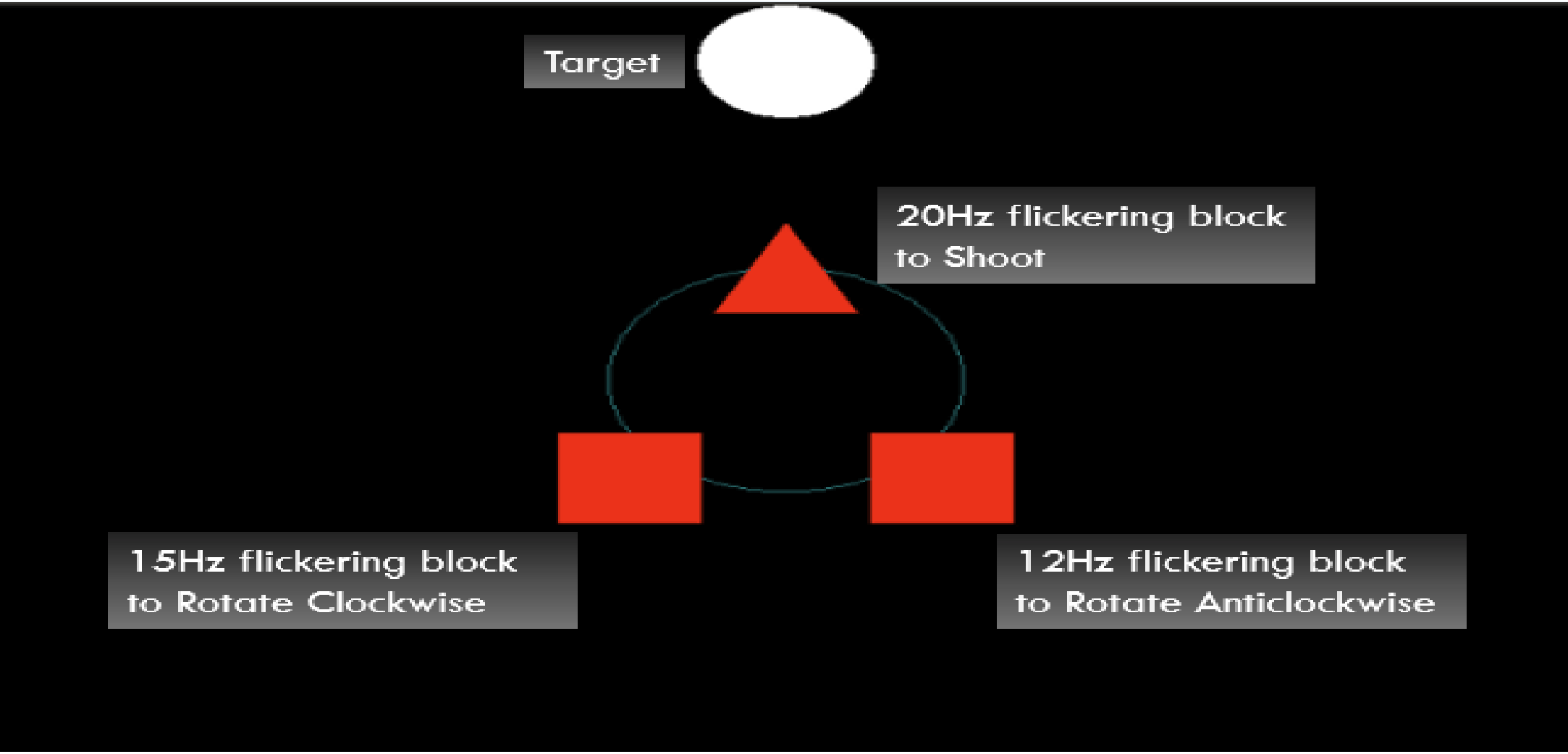
Steady State Visually Evoked Potential Based Brain Computer Interface for Game Control
Swati G. Bhat, Sushmitha S, Srinidhi Kalgundi Srinivas, Niranjana B Krupa
Conference 2024
Talks & Presentations
- GraspFactory: Large-Scale Object-Centric Dataset for Robotic Grasping — CoRL Workshop on Making Sense of Data in Robotics, 2025 [Video]
- Robotics @ Autodesk, Berkeley Summer Springboard, 2025
- Technical Presentation, Autodesk TechX, 2025
- Global Technical Conference, Analog Devices Inc, 2021
- India Technical Conference, Analog Devices Inc, 2020
Mentorship Experience
-
Jaimyn Drake – Perception Research and Applications Intern, Autodesk
(2025) [Supervised]
Object localization and grasping for manufacturing applications. -
Aditya Agarwal – Perception Research Intern, Autodesk (2025)
[Mentored]
Fast and Robust 6-DoF pose estimation architecture for industrial uses. -
Yash Shukla – Perception Research Intern, Autodesk (2024)
[Supervised]
Physically accurate antipodal grasp synthesis using simulation. -
Yashwanth Kumar – Software Engineer, Analog Devices Inc (2021)
[Mentored]
Automotive Audio Bus and SigmaStudio. -
Ashwin P S – Senior Software Engineer, Analog Devices Inc (2020)
[Mentored]
Automotive Audio Bus.
Featured Videos
GraspFactory: Large-Scale Object-Centric Dataset for Robotic Grasping
Autonomous Robotic Assembly of a Skateboard Truck